Introduction
When I was in school I ran across a robot named Cubli, a research project out of ETH Zurich. This robot was actuated by a set of orthogonal inertial wheels that imparted torques on it’s cube shaped body. Using these torques, the team was able to control the robot to balance on an edge or even a corner! I’ve always wanted to make a robot like this and it sounded like a good candidate project for a reinforcement learning control policy. It also was a good introductory project to working with the Isaac Sim and Isaac Gym toolset.
Source Video : The Cubli: a cube that can jump up, balance, and 'walk'
Simulation in Isaac Gym
The code for this project can be found here :
Some useful Resources :
Building the Simulated Cubli
Universal Robot Descriptor File (URDF)
One of the simplest ways of designing a robot to use in physics sims like Isaac is through a URDF. A URDF describes a robot with elements like Links and Joints. These connections are stored in a tree starting at a root element.
Links described the rigid bodies of a robot
Links contain the visual description that is used during rendering
Links contain the collision description that allows the robot to touch other objects in the environment
Links contain inertial information
Center of Mass
Mass Value
Inertial Matrix
For mor information about URDF links, see : http://wiki.ros.org/urdf/XML/link
Joints describe the way in which rigid bodies are connected. Each joint is a degrees of freedom the robot can move with
Joints have an orientation and location relative to the origin of the parent rigid Body
The joints used in this project are :
Continuous Joints. Rotation joints without a max and min angle
Fixed Joints. Constrains a child rigid body to the transformation of a parent rigid body.
For more information about URDF joints, see : http://wiki.ros.org/urdf/XML/joint
The design of my CubeBot follows the following structure.
CubeBody
Continuous Joint : Inertial Wheels. (six wheels in total, one for each cube face)
Fixed Joint : Wheel Marker (this is just a visual element so the spinning can be observed more easily)
Fixed Joint : CornerBumper (eight, one per corner of the cube)

URDF Graph generate with urdf_to_graphiz : http://wiki.ros.org/urdf
Download the full graphic with the button below
Using XML Macros (Xacro) to make URDFs easier to create
In my first iteration of the CubeBot, I created the URDF from scratch. The file tends to have a lot of repeated elements and becomes cumbersome to navigate pretty quickly. One way to mitigate this is through the use of xacro files. These files allow you to create templates for pieces of the robot and instantiate them as needed. The benifits I’ve noticed are
The overall amount of code that needs to be written was reduced since pieces could be reused
This helps mitigate typo bugs, and allows changes to be made much faster.
Variables such as mass, size, color, ect can be defined in one place so you won’t need to hunt through your code and manually change every instance
The instantiation of links and joints is in one spot which makes understanding the structure of the robot from code much easier
The URDF and Xacro files can be inspected in the github repo :
Importing into Isaac Gym and first tests
Controlling the Degrees of Freedom
The next thing to do is to verify that the robot is working as expected. I found that the best way to approach this was to modify some of the Issac Gym example codes to create an environment where the robot’s degrees of freedom could all be actuated. The original code examples come with the IsaacGym files : isaac/isaacgym/python/examples/. I found modifying the dof_control.py example to be the most convenient for testing my URDF files. To view the modified example code use the link below.
The mode has been modified to parse the YMAL configuration file that will be used during training. This was done so the parameters of this test environment and the training environment will be the same.
Each degree of freedom has a set of properties
Drive Mode : DOF_MODE_VEL
We will be setting target velocities for each inertial wheel
Stiffness : Used to calculate torque contribution from position error
Damping : Used to calculate torque contribution from velocity error
Velocity : Max DOF velocity (rad/sec)
Effort : Max DOF torque (n/m)
Friction : DOF friction
The DOF torque in this setup is calculated internally by the following equation :
Torque = (Stiffness)(PosError) + (Damping)(VelError)
I used this part of the project to tweak the Max Torque and Max Velocity setting to make sure the CubeBot could actuate itself. I tried to keep parameters near operating parameters of commercially available brushless motors. Specifically I used Maxon: EC90 Flat 600W as a reference for the max speed and torque.
Constructing the Observation tensor
This is a good time to start constructing the observation tensor to make sure it is working like we expect it to. For this task I started with :
The root state tensor
World Position (x,y,z)
Orientation Quaternion (q1,q2,q3,q4)
World Linear Velocity (x,y,z)
World Angular Velocity (x,y,z)
DOF Velocity (Inertial Wheels[0:6])
I believe with these observations the cube should be able to learn a control policy for balancing. The velocities might need to be switch to the local frame.
We can obtain the root state tensor with the following code :
actor_root_state = gym.acquire_actor_root_state_tensor(sim) root_states = gymtorch.wrap_tensor(actor_root_state) root_pos = root_states.view(1, 13)[0, 0:3] #num_envs, num_actors, 13 (pos,ori,Lvel,Avel) root_ori = root_states.view(1, 13)[0, 3:7] #num_envs, num_actors, 13 (pos,ori,Lvel,Avel) root_linvel = root_states.view(1, 13)[0, 7:10] #num_envs, num_actors, 13 (pos,ori,Lvel,Avel) root_angvel = root_states.view(1, 13)[0, 10:13] #num_envs, num_actors, 13 (pos,ori,Lvel,Avel)
The actor root state is unwrapped into a torch tensor. For organization we can create variables of each slices of the root state to obtain root_pos, root_ori, root_linvel and root_angvel. Each of these points to the root_states variable so updating root_pos will change root_states as well.
root_states is located on the CPU but needs to be updated from the GPU pipeline. This can be done with a function call :
gym.refresh_actor_root_state_tensor(sim)
Similar to the root state, the dof state can be obtained with the following code :
dof_state_tensor = gym.acquire_dof_state_tensor(sim) dof_state = gymtorch.wrap_tensor(dof_state_tensor) num_dof = 6 dof_pos = dof_state.view(num_dof, 2)[:, 0] dof_vel = dof_state.view(num_dof, 2)[:, 1]
The dof state tensor contains information about all the dof in the sim. Since we only have one actor this wont be too complicated. With multiple actors we will need to keep better track of which dof belongs to which actor.
Like the root_state, the dof_state is unwrapped to a torch tensor
Like the root_state, the dof_state is seperated into the dof_pos and dof_vel components
Like the root_state, the dof_state needs to be updated with a function call :
gym.refresh_dof_state_tensor(sim)
The action tensor
To keep things simple for now, we will be using 6 actions for the CubeBot. Each face of the bot has an inertial wheel with a DOF so each action will directly control an inertial wheel. The actions are in the range [-1, 1] and will be scaled by the MaxVelocity parameter. This allows the bot to control the target velocity of each of the inertial wheels.
First Reinforcement Learning Task
Now that we know the cube is behaving somewhat realistically, we can start modifying some of the other example code to get an environment running to teach our CubeBot. I started by modifying the CartPole example code to get this project off the ground. There are a few files we will need to edit to make sure things work correctly.
We need to create a new VecTask for our project. The class will be called CubeBot. The names of subsequent files will be named according to this class name.
This file defines the parameters of the simulation and the definition of our robot
CubeBot.py should be in the directory training/tasks
We need to add this new VecTask to the __init__.py file so it can be referenced by other files outside this directory
__init__.py should be in training/tasks
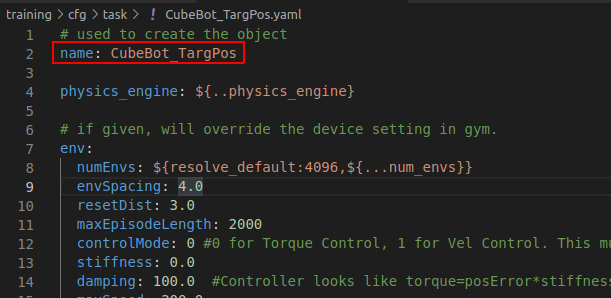
We need to create a new configuration file called CubeBot.ymal
This contains parameters for setting up the environment simulation
This should be in the directory : training/cfg/tasks
We need to create a new configuration file called CubeBotPPO.ymal
This contains the parameters used by RL_Games in there algorithm implementations
This should be in the directory : training/cfg/train
Most of the work we will be doing will be in the CubeBot.py : CubeBot class.
__init__ is where we will parse the configuration data from the ymal file, define the observation tensors, and create the sim.
The super, VecTask init called self.create_sim()
create_sim() will create the environments for our learning task
create_sim() calls _create_envs(). It is here where the assets are loaded, initial states are set, the dof_properties for the actor are set.
compute_rewards() calls a jit script that returns rewards and the reset state for each environment.
A jit script will compile our python code with the TorchScript compiler so it can be run on the GPU
compute_observations() is where we will update our observation buffer
In this first project, the compute_observations function is not a jit script. In later tasks we will change this to a jit script.
reset_idx()
This function is responsible for resetting environments that have reached a done state.
The set_actor_root_state_tensor_indexed, allows us to update the state of an actor directly
The set_dof_state_tensor_indexed, allows us to update the state of the dof tensor.
pre_physics_step()
Here we apply the actions determined by the RL network
This function is called in the super class, step() routine
After this step, the physics of the simulation are updated by 1 timestep
post_physics_step()
Here the environment resets are handled first
We call the compute_observations function
We call the compute_reward function
The reward Function
The reward function is how we will direct the behavior learned by the RL agent. For this example we will simply reward the bot on each step with the Z-height of the first corner bumper on the CubeBot. This corner is highlighted in yellow in the videos.
reward = corner_height
The RL algorithm will try to maximize the reward and thus, the cube should learn a control policy that brings the corner to the highest possible position. Ideally this requires staying in the unstable equilibrium point of balancing on one corner. There are three states I can imagine the algorithm finding.
Laying on a face with the first corner on the top. This will result in a reward of 0.3 on each step. 0.3 is the box edge length
Balancing on an edge with the first corner on top. This is an improvement of the above policy and would result in a reward of about 0.42 on each step.
Balancing on a corner with the first corner on top. This should maximize the reward and result in about 0.52 reward on each step.



Initial Training Results
For this first run, the only reward parameter was the corner height. The training ran 80 million environment steps in about 20 minutes. THIS IS HUGE! This quantity of environment samples using PyBullet would have taken days! Needless to say, the Isaac Gym environment learns very fast when compared to other environments. Below is a snapshot of the reward vs. step logged in tensorboard :

It seems to have achieved it’s maximum reward fairly early, around 20M steps. The decline in performance may be from catastrophic forgetting, as the agent does better it has less examples in it’s experience buffer of ‘bad’ states. Over time it may learn policies that do not handle these states well. Lets take a look at the performance of a few of the checkpointed models. We will look at : 500k (First Saved Model), 1.5M , 10M, 20M, 50M and 82M(Last Saved Model).
Adding a second parameter to the reward
We can add parameters to the reward to shape the learned behavior. Lets try adding a penalty associated with large rotational velocities for each of the inertial wheels. Below we will take the average of the square of the wheel speeds. The wheel_speeds variable is scaled by the maximum speed resulting in a value between [-1, 1]
penalty = torch.sum(torch.square(wheel_speeds), dim=1)/6 # Wheel velocity observation is scaled between -1 and 1 reward = corner_height - penalty
So how did it perform?

It seems to be able to place the first corner face up but it never learned the behavior of balancing. Maybe given more time it would learn a policy that achieves this but it might be too far outside the range of actions that this policy will randomly select.
The relative scale of rewards between the corner height and the wheel velocities might have lead to a situation where it wasn’t worth standing up because too many points would be lost spinning the wheels at a high enough velocity to stand. Lets try this again by this time we will scale the penalty by a multiplier. I’m going to use 0.5 and 0.1 and see how they compare to the previous results
penalty = torch.sum(torch.square(wheel_speeds), dim=1)/6 # Wheel velocity observation is scaled between -1 and 1 reward = corner_height - penalty*penaltyMultiplier

penaltyMultiplier = 0.5 might have been a good scale. The network is consistently improving throughout training.
penaltyMultiplier = 0.1 looks like it was following the learning trajectory of the original, no penalty, case
In order to compare the results, I think looking at the accumulation of penalty over an episode might be meaningful.
The penalty accumulated over 1000 episodes will be averaged for each of the networks above
| A | B | C | |
|---|---|---|---|
1 | |||
2 | penalty multiplier | average penaly eps=1000 | |
3 | 0 | 144.89 | |
4 | 0.1 | 101.11 | |
5 | 0.5 | 47.09 | |
6 | 1 | 17.432 |
The trend between the penalty multipler and average penalty shows that as we increase the multiplier, the network learns a policy that better minimizes that parameter. Another thing that might be interesting to look at is what the time series wheel velocity data looks like. For this metric we will look at the data of individual environments.

Multiplier = 0.0



Multiplier = 0.1



Multiplier = 0.5



Multiplier = 1.0



As the penalty multiplier increase, the range of velocities seems to decrease. This somewhat confirms that the original wheel velocity penalty was causing the cube not to learn to stand. Below is a video showing the performance of each of the three individuals plotted above.
Extra Notes :
When creating a new RL project, remember to change the name in the ymal files. At first my wheel_vel modifications were still using the original code even though the reference in the task table was updated. This name will correspond to where output files are saved as well.
Since the randomization seeds are set, we get reproducible training results. Additionally when testing policy to policy the starting conditions should be the same.
After thinking some more, perhaps wheel velocity wasn’t a great penalty parameter. Torque might be a better parameter as it is more closely associated with the energy used by the motors. I’ll add this a little later