Getting Started with Issac Gym
Designing Robots
URDF + Xacro
Solidworks
Isaac Sim
Training Robots
The goal of this project was to explore how to use Isaac sim to train reinforcement learning policies and to study the workflow for deployment to a Nvidia Jetson embedded system. Click below to find out more.
CubeBot

Click for more information
This project is ported from some work I was doing with pybullet. The goal was to create a robot where the primary mode of locomotion was from induced torques produced by reaction wheels.
WalkBot
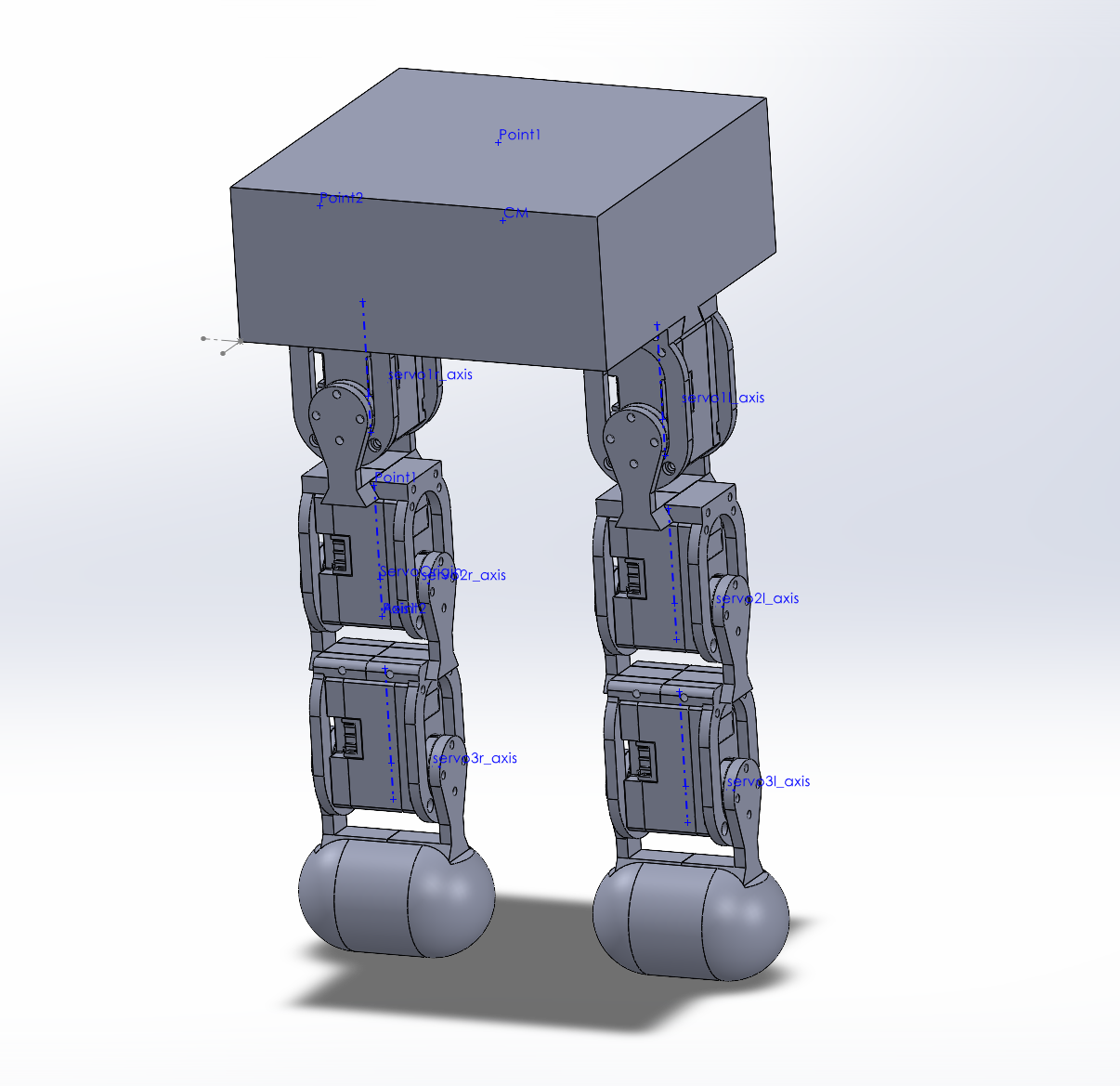
Click for more information
This project involves designing a robot in solidworks, porting the mechanical designs to a URDF file and training a locomotion policy with Isaac Gym. The goal is to design a robot that I can build with a 3D printer and off the shelf parts that can execute a control policy learned in simulation